



Copyright m.iexvn.com All Rights Reserved. ©河南贏響力文化傳媒有限公司
豫公網安備41071102000689

基于離散元法的振動篩顆粒觸篩和透篩分析
趙嘉樂, 童昕, 李占福, 崔德海
摘要:為了提高振動篩的篩分效率,采用離散元法對振動篩的篩分過程進行仿真模擬,分析篩分過程中顆粒觸篩與透篩概率對篩分效率的影響,利用隨機森林算法建立了篩機參數與顆粒觸篩、透篩概率的數據模型,分析各篩機參數對顆粒觸篩、透篩概率的影響權重及規律,結果表明:顆粒觸篩概率主要受振動頻率、振動幅度和振動方向角的影響;顆粒透篩概率主要受篩網傾角及篩孔孔徑的影響。利用布谷鳥尋優算法進行參數優化,尋優得到振動頻率為15 Hz,振動幅度為2 mm,振動方向角為50°,篩網傾角為20°,篩網長度為160 mm,篩孔孔徑為1.0 mm,篩絲直徑為0.7 mm為篩機參數的最優組合參數。
關鍵詞:離散元法 觸篩概率 透篩概率 隨機森林算法 參數優化
篩分機械廣泛應用于煤礦開采、金屬冶金、食品加工等行業,通過對篩網施加振動,使得散體物料實現松散、分層、觸篩和透篩,最終達到物料分級的目的[1-3]。篩分效率是衡量篩分機械性能的重要指標,因此研究人員[4-5]普遍將提高篩分效率作為優化篩機參數的主要目標。篩分過程中,各顆粒間受力交叉影響,顆粒速度大小與運動方向復雜多變,采用離散元法(discrete element method, DEM)可以記錄顆粒的運動,并準確模擬顆粒間的碰撞,這種方法在篩分過程的數值模擬中得到了廣泛應用[6-7]。
物料接觸篩網并順利透篩是完成篩分最直觀的現象,也是影響篩分性能的關鍵環節[8-9]。韋魯濱等[10]提出了單顆粒平均觸篩概率,研究發現未透篩顆粒粒徑分布受平均觸篩概率和摩根森透篩概率的影響。陳濤等[11]分析了振動參數對顆粒群平均觸篩概率的影響。王翠等[12]分析了進料速率對顆粒透篩概率的影響。Peng等[13]分析了細濕顆粒的透篩行為,得到了振動篩結構參數和振動參數對篩分效率的影響規律。Asbj?rnsson等[14]、Dong等[15]分析了篩孔形狀對顆粒透篩行為的影響,結果表明在相同開孔率下,顆粒在矩形篩孔的透篩概率最高,但采用矩形篩孔將會增大棒狀顆粒和條狀顆粒的透篩概率。Feng等[16]分析了不規則顆粒的透篩行為,研究發現顆粒質心位于接觸點左側時,顆粒更容易實現透篩。在篩分過程中,顆粒觸篩與透篩2個環節之間相互影響,顆粒觸篩是實現透篩的前提,而顆粒透篩將改變篩上顆粒數量,進而影響顆粒觸篩。以往的相關研究大多分析了單一環節與篩分效率的關系,而忽略了兩者共同作用對篩分效率的影響。鑒于此,我們利用離散元法模擬篩分過程,并計算顆粒觸篩概率與顆粒透篩概率,采用隨機森林算法建立篩機參數與顆粒觸篩概率、顆粒透篩概率的數據模型,分析各篩機參數對顆粒觸篩概率和顆粒透篩概率的影響權重及規律,采用布谷鳥尋優算法優化篩機參數組合并進行實驗驗證。
1 仿真模型的建立
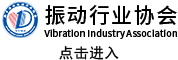
將振動篩結構進行合理簡化后導入EDEM仿真軟件,簡化模型如圖1所示。篩網采用工業編織網結構,篩孔為正方形。入料顆粒選用球形顆粒,為了模擬自然界中顆粒粒徑的分布狀態,采用直徑均值為0.5、 1.0 mm的雙峰正態曲線生成物料, 選取0.9 mm作為目標分離粒徑, 將小于目標分離粒徑的顆粒定義為小顆粒, 大于目標分離粒徑的顆粒定義為大顆粒。 實驗過程中共生成20 000個顆粒, 顆粒生成速度為每秒13 333顆。實驗中材料的物性參數及碰撞系數如表1、 2所示。
振動篩可控參數較多,其中振動參數與結構參數是影響篩分效率的主要因素,根據實際工作條件確定各個參數的取值范圍,詳見表3。
入料顆粒經篩分后,篩下物由小顆粒和部分大顆粒組成,因此采用綜合篩分效率作為篩分性能的評價指標。綜合篩分效率的計算公式為
η=( Μ D1 Μ S1 - Μ D2 Μ S2 )×100% 。 (1)
式中: MD1為篩下物中小顆粒的質量, kg; MS1為入料顆粒中小顆粒的質量, kg; MD2為篩下物中大顆粒的質量, kg; MS2為入料顆粒中大顆粒的質量,kg。
2 觸篩和透篩概率的計算與分析
2.1 篩分過程分析
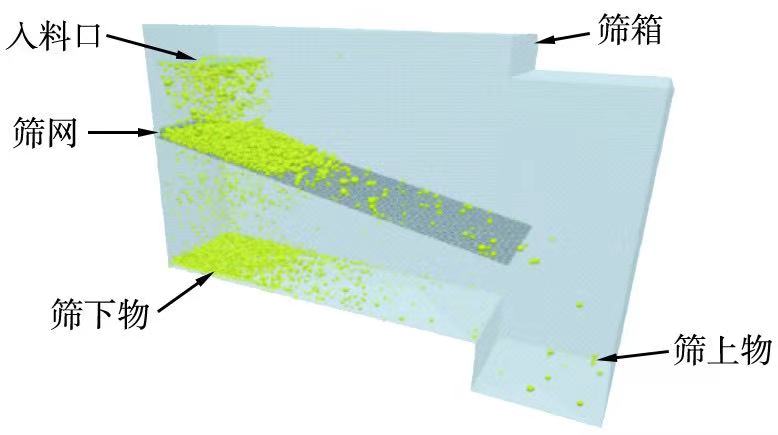
篩分過程中,入料顆粒與篩網接觸碰撞后透過篩網成為篩下物,顆粒的觸篩和透篩是影響篩分性能的關鍵環節。顆粒數量隨時間的變化規律如圖2所示。由圖可以看出,根據篩上顆粒數量的變化曲線,可將整個篩分過程分為3個階段,即入料階段、穩定篩分階段及篩分結束階段。根據篩下顆粒數量的變化曲線可知,穩定篩分階段對篩分結果影響最大,因此選取穩定篩分階段對顆粒觸篩概率和顆粒透篩概率進行分析。
2.2 觸篩概率的計算與分析
根據摩根森透篩概率公式,單顆粒在每次觸篩時的透篩概率是確定值,因此篩上顆粒的觸篩概率是影響篩分效率的主要因素。將與篩網距離小于或等于自身半徑的顆粒定義為觸篩顆粒。小顆粒觸篩概率與大顆粒觸篩概率的計算公式為
Ρ cx = Ν x Ν 1 ×100% , (2)
Ρ cd = Ν d Ν 2 ×100% 。 (3)
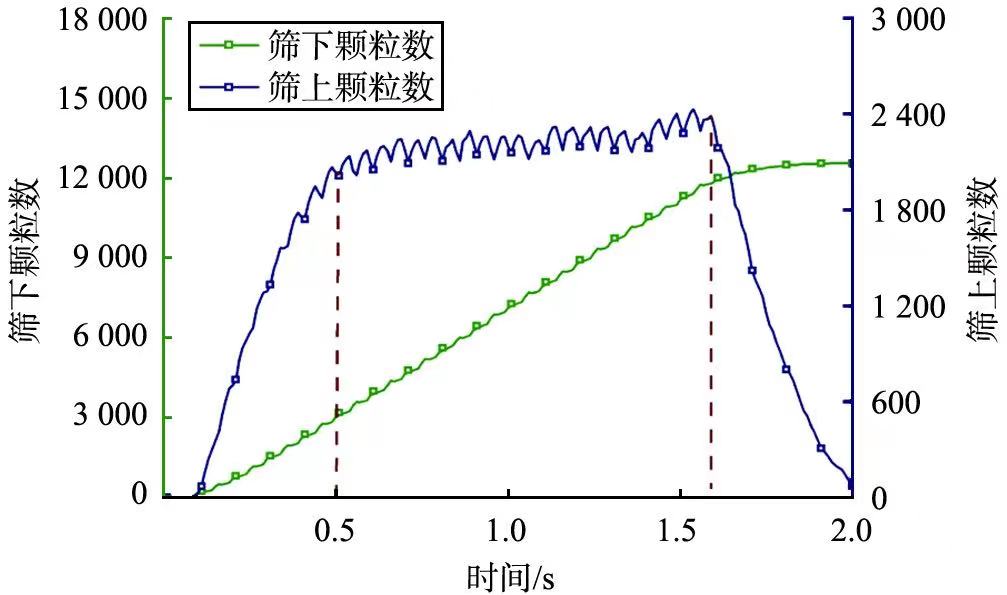
式中: Pcx為小顆粒觸篩概率, %; Pcd為大顆粒觸篩概率, %; Nx為觸篩顆粒中小顆粒數; Nd為觸篩顆粒中大顆粒數; N1為篩上顆粒中小顆粒總數; N2為篩上顆粒中大顆粒總數。顆粒觸篩概率隨時間的變化規律如圖3所示。
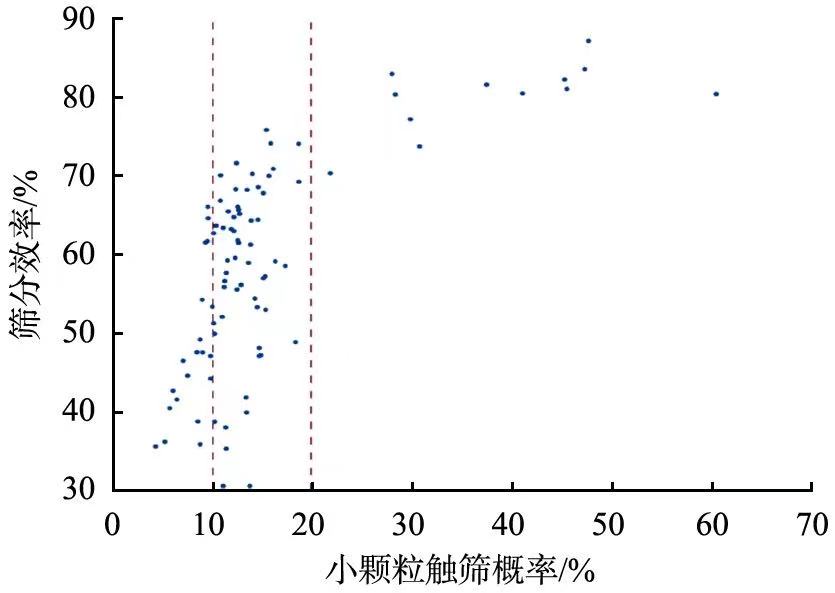
顆粒觸篩概率隨時間呈周期性變化,篩網從平衡位置向上運動過程中不斷擠壓篩上顆粒,觸篩顆粒數量增多,顆粒觸篩概率增大。篩網從最高位置向下運動過程中,顆粒觸篩概率逐漸減小,直至篩網運動至最低位置時,顆粒觸篩概率接近0。篩上顆粒經松散、分層后,小顆粒將會運動至料層底部,率先與篩網發生接觸,因此大顆粒觸篩概率峰值出現時間相對滯后。小顆粒觸篩概率與篩分效率的關系如圖4所示。由圖可知, 小顆粒觸篩概率與篩分效率呈現正相關關系, 其皮爾遜相關系數為0.65。 小顆粒觸篩概率主要分布在10%~20%之間, 當小顆粒觸篩概率大于20%時, 篩分效率整體較高, 穩定在72%以上。
2.3 顆粒透篩概率的計算與分析
顆粒透篩是篩分過程的最終環節,假設單個顆粒在一個振動周期內僅與篩網發生一次接觸,以篩網單次振動時間為間隔,小顆粒透篩概率與大顆粒透篩概率的計算公式為
Ρ tx = Ν tx Ν 3 ×100% , (4)
Ρ td = Ν td Ν 4 ×100% 。 (5)
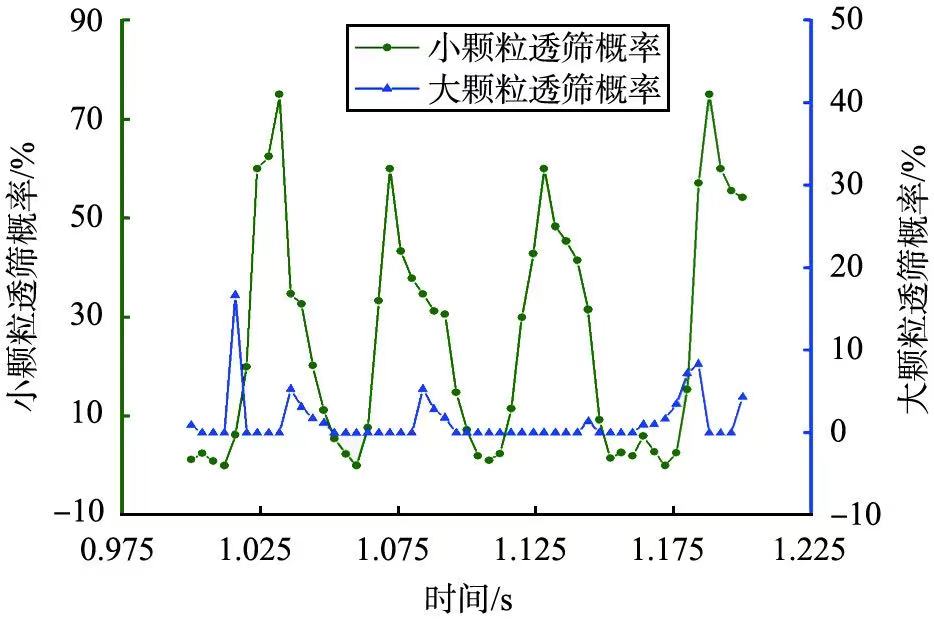
式中: Ptx為小顆粒透篩概率,%; Ptd為大顆粒透篩概率,%; Ntx為觸篩顆粒中透過篩網的小顆粒數; Ntd為觸篩顆粒中透過篩網的大顆粒數; N3為觸篩顆粒中小顆粒數; N4為觸篩顆粒中大顆粒數。顆粒透篩概率的變化規律如圖5所示。
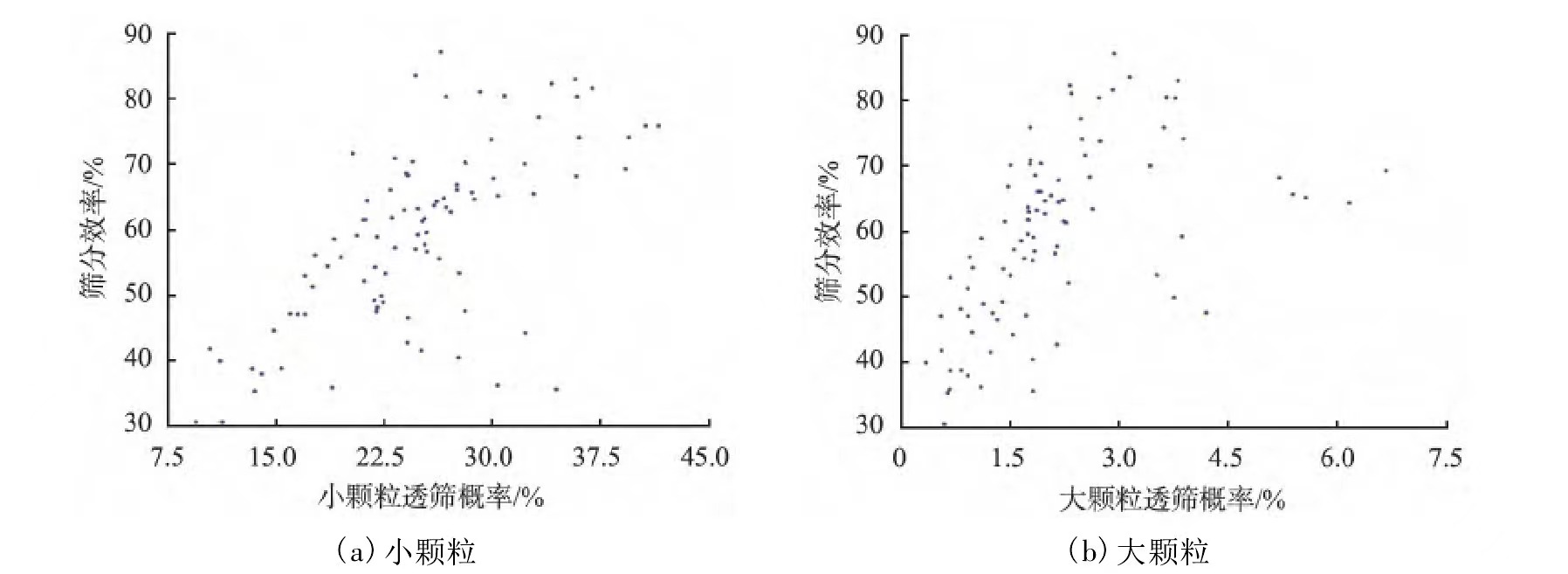
小顆粒透篩概率隨時間呈周期性變化規律,變化趨勢與小顆粒觸篩概率相反。小顆粒觸篩概率較高時,同一時間內與篩網接觸的顆粒數量較多,顆粒之間的接觸碰撞會影響小顆粒的透篩行為,因此小顆粒透篩概率降低。而大顆粒透篩概率則表現出較強的隨機性,其數值整體偏小,且多數時刻為0。顆粒透篩概率與篩分效率的關系如圖6所示。
小顆粒透篩概率、大顆粒透篩概率與篩分效率的皮爾遜相關系數分別為0.65、0.54,即顆粒透篩概率與篩分效率呈正相關關系。由圖6(a)可知,隨小顆粒透篩概率增大,篩分效率整體呈上升趨勢。由圖6(b)可知,隨大顆粒透篩概率增大,篩分效率呈先增后減的變化趨勢。大顆粒透篩概率小于3%時,隨大顆粒透篩概率的增大,小顆粒透篩概率也增大,且增長速率更快,因此篩分效率呈現上升趨勢;但當大顆粒透篩概率大于3%后,小顆粒透篩概率則相對穩定,因此篩分效率呈現下降趨勢。
3 數據建模
集成學習的基本原理是集成多個子模型,由每個子模型對數據進行分類判斷,綜合每個子模型的判斷結果進行投票選擇,最終做出判決,即使在弱模型對原始數據分類或預測精度不高的情況下,最終的分類或預測結果也可以達到較高的精度。隨機森林算法(random forest algorithm, RF)采用決策樹模型,綜合多個決策樹模型的預測結果進行分類投票,最終回歸均值[17]。隨機森林算法有著較高的預測精度,模型的泛化能力較好,且不易出現過擬合現象。
3.1 小顆粒觸篩概率的建模分析
采用隨機森林算法建立7個篩機參數與小顆粒觸篩概率的數據模型,進一步分析篩機參數對顆粒觸篩概率的影響。利用集成學習的XGBoost(extreme gradient boosting)可以獲取篩機參數對小顆粒觸篩概率的影響權重[18],分析結果如表4所示。
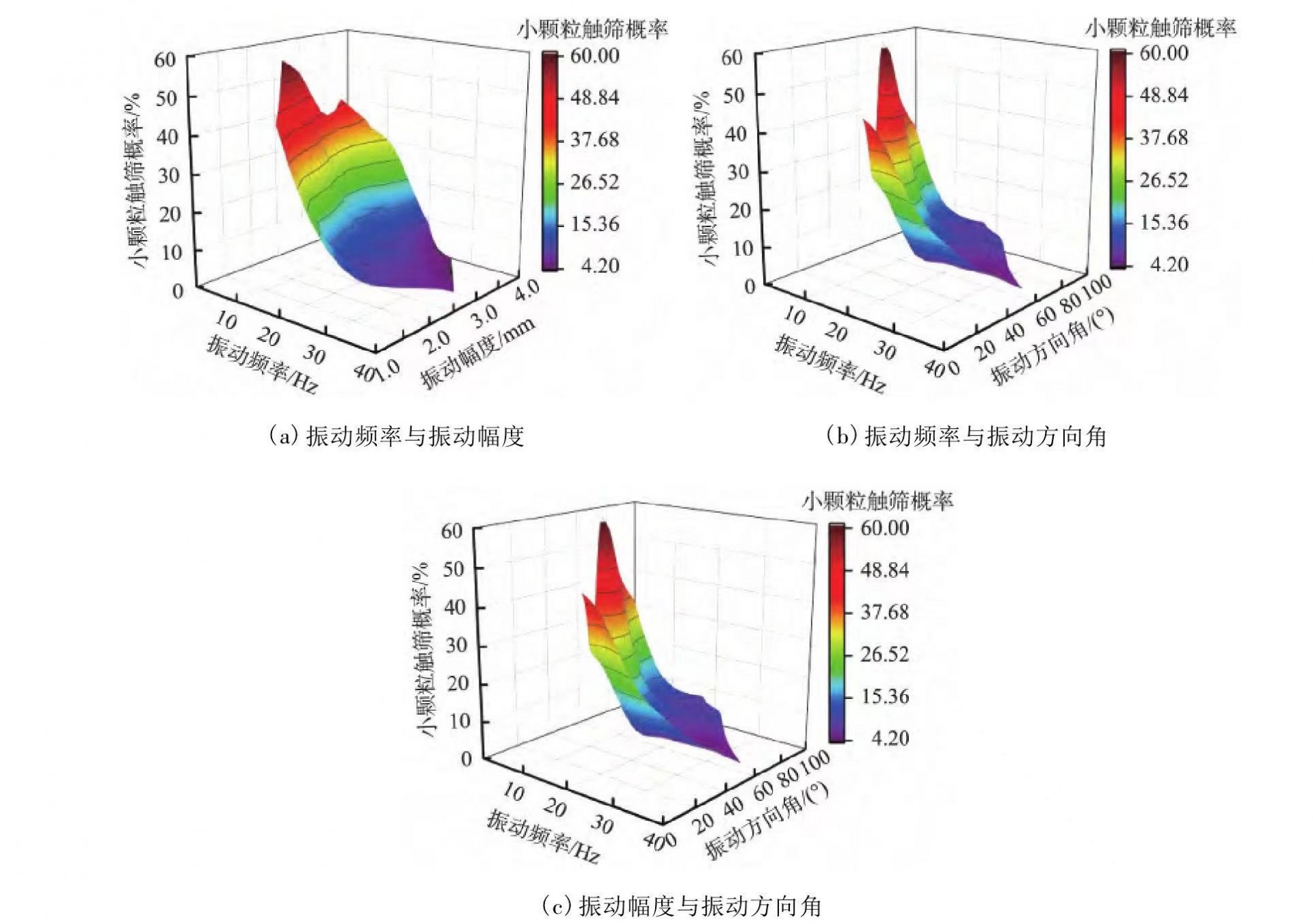
由表4可知,振動頻率、振動幅度及振動方向角對小顆粒觸篩概率的影響權重較大。振動頻率、振動幅度及振動方向角對小顆粒觸篩概率的影響規律如圖7所示。由圖可知,小顆粒觸篩概率隨振動頻率、振動幅度和振動方向角的增大逐漸減小。當振動頻率和振動幅度較大時,顆粒與篩網碰撞后將會被拋起至較高的位置,容易發生“揚塵”現象,單位時間內小顆粒的觸網次數將大幅度減少,小顆粒觸篩概率減小。振動方向角較小時,顆粒主要沿篩網方向運動,此時顆粒的跳動幅度較小,更易與篩網接觸,因此小顆粒觸篩概率增大;振動方向角較大時,顆粒主要沿垂直篩網方向運動,顆粒的跳動幅度增大,其與篩網的接觸次數減小,但振動方向角無法為顆粒運動提供能量,故隨振動方向角的增大,小顆粒觸篩概率呈現減小趨勢。
3.2 小顆粒透篩概率的建模分析
采用隨機森林算法建立7個篩機參數與小顆粒透篩概率的數據模型,得到篩機參數對小顆粒透篩概率的影響權重如表5所示。
由表5可知,篩網傾角和篩孔孔徑對小顆粒透篩概率的影響權重較大,其對小顆粒透篩概率的影響規律如圖8所示。
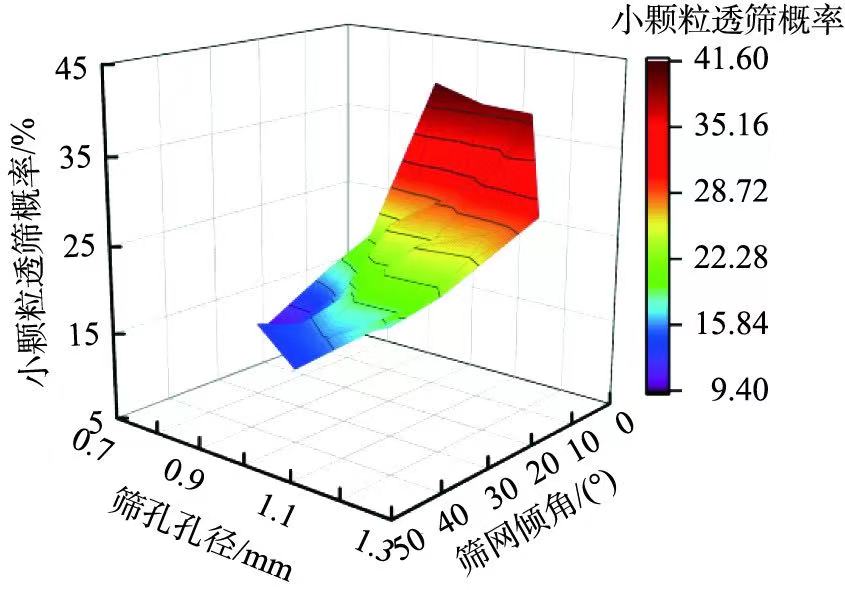
隨篩網傾角的增大,小顆粒透篩概率逐漸減小;隨篩孔孔徑的增大,小顆粒透篩概率逐漸增大。小顆粒透篩概率與篩孔的水平投影面積有關,在篩絲直徑等參數確定的情況下,篩孔的水平投影面積隨篩網傾角的增大而減小,隨篩孔孔徑的增大而增大,當篩孔的水平投影面積較小時,小顆粒在下落過程中易與篩絲發生接觸碰撞,不易實現透篩。
3.3 大顆粒透篩概率的建模分析
采用隨機森林算法建立7個篩機參數與大顆粒透篩概率的數據模型,得到篩機參數對大顆粒透篩概率的影響權重如表6所示。
由表6可知,大顆粒透篩概率主要受篩孔孔徑的影響,篩孔孔徑對大顆粒透篩概率的影響規律如圖9所示。
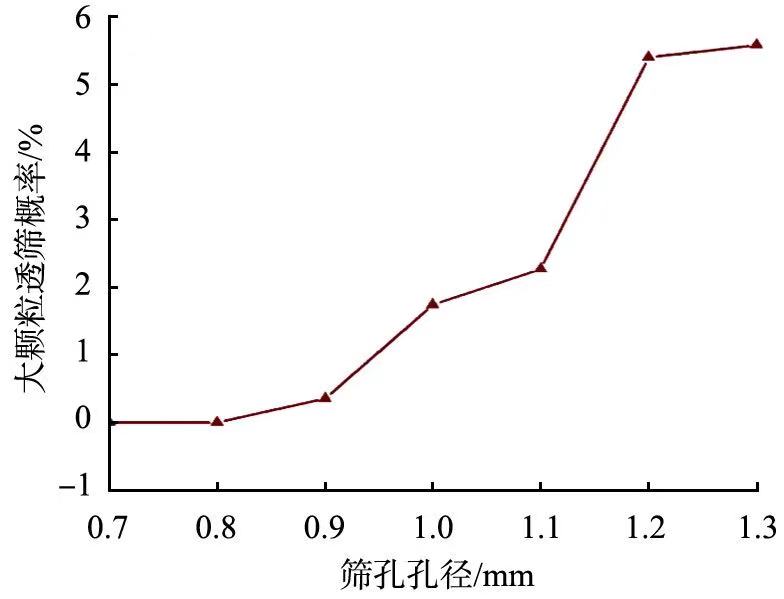
隨篩孔孔徑增大,大顆粒透篩概率逐漸增大。當篩孔孔徑小于1.1 mm時,大顆粒透篩概率均在3%以下,且增幅較為平穩;當篩孔孔徑大于1.1 mm時,大顆粒透篩概率有明顯提升,且穩定在5%以上。當大顆粒透篩概率小于3%時,篩分效率呈增大趨勢,而大顆粒透篩概率大于3%時,篩分效率呈減小趨勢,因此應將篩孔孔徑控制在1.1 mm以內。
4 參數優化
顆粒的觸篩概率主要受振動頻率、振動幅度和振動方向角的影響,而顆粒的透篩概率則主要受篩網傾角和篩孔孔徑的影響。通過上述數據模型,可以尋求合適的篩機參數以取得較優的顆粒觸篩概率與顆粒透篩概率,從而獲得較高的篩分效率。
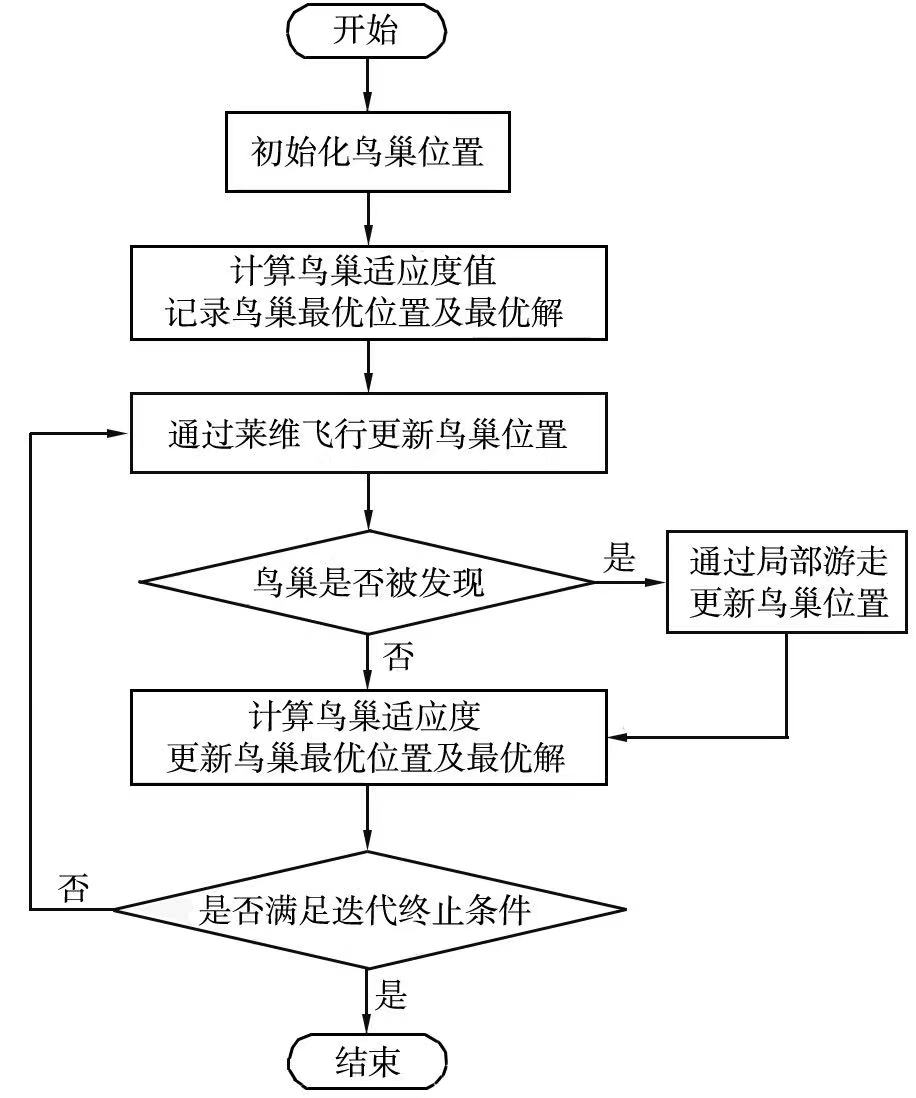
布谷鳥尋優算法(cuckoo search algorithm, CS)是一種群智能優化算法,其基本思想是布谷鳥的巢寄生性和萊維飛行機制。布谷鳥尋優算法相較其他群智能優化算法具有參數少、收斂速度對參數變化不敏感、全局搜索能力強、不易陷入局部最優解等優點[19]。布谷鳥尋優算法的流程圖如圖10所示。
采用布谷鳥尋優算法對篩機參數進行多目標優化,將鳥巢位置設置為7維變量,分別對應不同的篩機參數。在算法迭代過程中,通過數據模型將篩機參數組合轉化為小顆粒觸篩概率、小顆粒透篩概率及大顆粒透篩概率。顆粒觸篩是實現透篩的前提,且顆粒觸篩概率是影響篩分效率的主要因素,因此將顆粒觸篩概率的權重設置為0.5;篩下物中小顆粒數量與大顆粒數量對篩分效率的影響權重相同,因此將小顆粒透篩概率與大顆粒透篩概率的權重均設置為0.25,并確定優化目標函數為
f=10log(0.5Pcx+0.25Ptx-0.25Ptd) 。 (6)
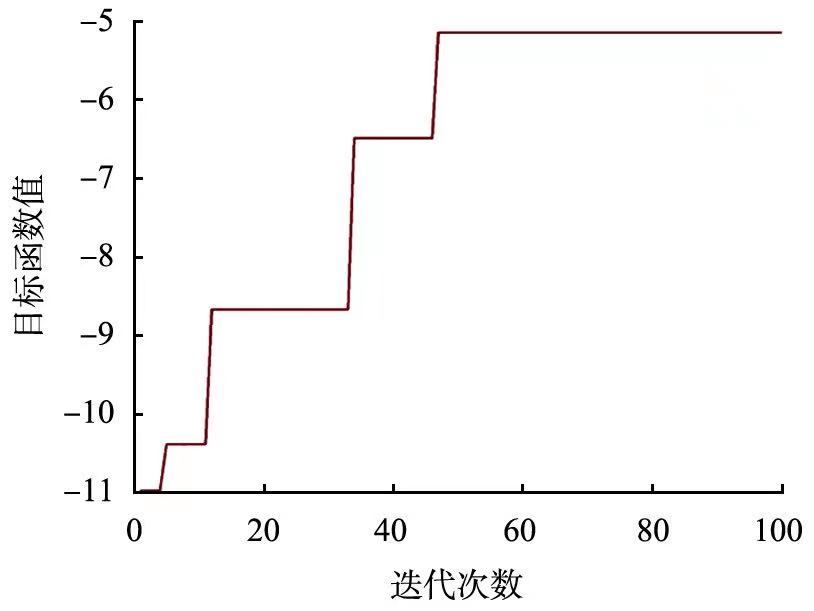
在篩機參數空間中隨機生成500個鳥巢位置, 計算每個鳥巢位置的目標函數值, 設置最大的迭代次數為100次, 經過迭代計算后,布谷鳥尋優算法收斂圖如圖11所示。由圖可以看出,算法迭代進行至47次后, 目標函數達到最小值, 此時所返回的鳥巢位置即為篩機參數的最佳組合。 尋優所得的篩機參數組合:振動頻率為15 Hz, 振動幅度為2 mm, 振動方向角為50°, 篩網傾角為20°, 篩網長度為160 mm, 篩孔孔徑為1.0 mm, 篩絲直徑為0.7 mm時,小顆粒觸篩概率為45%,小顆粒透篩概率為34%,大顆粒透篩概率為2.3%。
利用尋優所得的篩機參數組合設置仿真實驗,計算得到小顆粒觸篩概率為41%,小顆粒透篩概率32%,大顆粒透篩概率2.1%,篩分效率為82.2%。仿真模擬結果與尋優結果接近,驗證了數據模型及尋優結果的準確性。
5 結論
1)顆粒觸篩和透篩概率與篩分效率均呈正相關關系。顆粒觸篩概率主要分布在10%~20%之間,當顆粒觸篩概率大于20%時,篩分效率較高且穩定在72%以上。隨小顆粒透篩概率增大,篩分效率整體呈上升趨勢。隨大顆粒透篩概率增大,篩分效率呈先增后減的趨勢。
2)顆粒觸篩概率主要受振動頻率、振動幅度和振動方向角的影響,顆粒透篩概率則主要受篩面傾角和篩孔孔徑的影響。隨振動頻率、振動幅度和振動方向角的增大,顆粒觸篩概率逐漸減小;減小篩面傾角、增大篩孔孔徑則會增大顆粒透篩概率。
3)利用布谷鳥尋優算法優化所得的篩機參數組合為:振動頻率為15 Hz, 振動幅度為2 mm, 振動方向角為50°,篩網傾角為20°,篩網長度為160 mm, 篩孔孔徑為1.0 mm, 篩絲直徑為0.7 mm。
4)優化所得顆粒觸篩概率為45%,小顆粒及大顆粒的透篩概率分別為34%、 2.3%。根據尋優所得的參數組合設置仿真實驗,計算得到小顆粒觸篩概率為41%,小顆粒及大顆粒透篩概率分別為32%、 2.1%,篩分效率為82.2%,仿真計算結果與尋優結果接近,驗證了數據模型及尋優結果的準確性。
參考文獻
[1]JIANG H S,ZHAO Y M,QIAO J P,et al.Process analysis and operational parameter optimization of a variable amplitude screen for coal classification[J].Fuel,2017,194:329-338.
[2]DAVOODI A,ASBJ?RNSSON G,HULTHéN E,et al.Application of the discrete element method to study the effects of stream characteristics on screening performance[J].Minerals,2019,9(12):788.
[3]SHEN G L,TONG X.Particle stratification of a vibrating screen with translation-swing composite motion[J].Journal of Vibroengineering,2020,22(3):498-508.
[4]LI Z F,JIA P Y,LI K Y,et al.Study on screening performance and parameter optimization of vibrating-dewatering screen[J].Advances in Mechanical Engineering,2021,13(9):97-100.
[5]CHEN Z Q,TONG X,LI Z F.Numerical investigation on the sieving performance of elliptical vibrating screen[J].Processes,2020,8(9):1151.
[6]CHEN B,YAN J,MO W,et al.DEM simulation and experimental study on the screening process of elliptical vibration mechanical systems[J].Journal of Vibroengineering,2019,21(8):2025-2038.
[7]李占福,童昕,周廣濤.基于離散單元法的平擺篩設計及其透篩機理分析[J].機械設計與研究,2016,32(1):145-149.
[8]DAVOODI A,BENGTSSON M,HULTHéN E,et al.Effects of screen decks’ aperture shapes and materials on screening efficiency[J].Minerals Engineering,2019,139(1):105699.
[9]溫鵬飛,喬金鵬,段晨龍,等.變振幅等厚篩分過程物料透篩行為及分布研究[J].煤礦機械,2020,41(4):165-167.
[10]韋魯濱,陳清如.煤用概率分級篩數學模型的研究[J].煤炭學報,1995(1):57-62.
[11]陳濤,童昕.基于DEM的篩分觸篩機理的探究[J].礦山機械,2014,42(9):93-97.
[12]王翠,寧水根,王桂鋒,等.基于擺動篩面設計的進料速率對分層和透篩的影響研究[J].機械設計,2021,38(4):117-122.
[13]PENG L P,FENG H H,WANG Z Q,et al.Screening mechanism and properties of a cantilevered vibrating sieve for particles processing[J].Applied Sciences,2019,9(22):4911.
[14]ASBJ?RNSSON G,BENGTSSON M,HULTHéN E,et al.Model of banana screen for robust performance[J].Minerals Engineering,2016,91:66-73.
[15]DONG K,ESFANDIARY A H,YU A B.Discrete particle simulation of particle flow and separation on a vibrating screen:effect of aperture shape[J].Powder Technology,2016,314:195-202.
[16]FENG X,GONG Z P,WANG L J,et al.Behavior of maize particle penetrating a sieve hole based on the particle centroid in an air-screen cleaning unit[J].Powder Technology,2021,385:501-516.
[17]王奕森,夏樹濤.集成學習之隨機森林算法綜述[J].信息通信技術,2018,12(1):49-55.
[18]李占山,劉兆賡.基于XGBoost的特征選擇算法[J].通信學報,2019,40(10):101-108.
[19]GANDOMI A H,YANG X S,ALAVI A H.Cuckoo search algorithm:a metaheuristic approach to solve structural optimization problems[J].Engineering with Computers,2013,29(1):17-35.
文章來自:《中國粉體技術》2022年04期


